
About Me
I am currently pursuing a Ph.D. at the School of Computer Science and Technology, University of Science and Technology of China (USTC) under the supervision of Prof. Yanyong Zhang. Prior to that, I received my B.E. degree in 2020 from School of Computer Science at Chongqing University (CQU).
My research interest includes:
- Simultaneous Localization and Mapping (SLAM)
- Neural Radiance Fields (NeRF)
- 3D Gaussian Splatting (3DGS)
News
- 2025.12.02: Our paper PocketMap is accepted by IMWUT/UbiComp 2025!
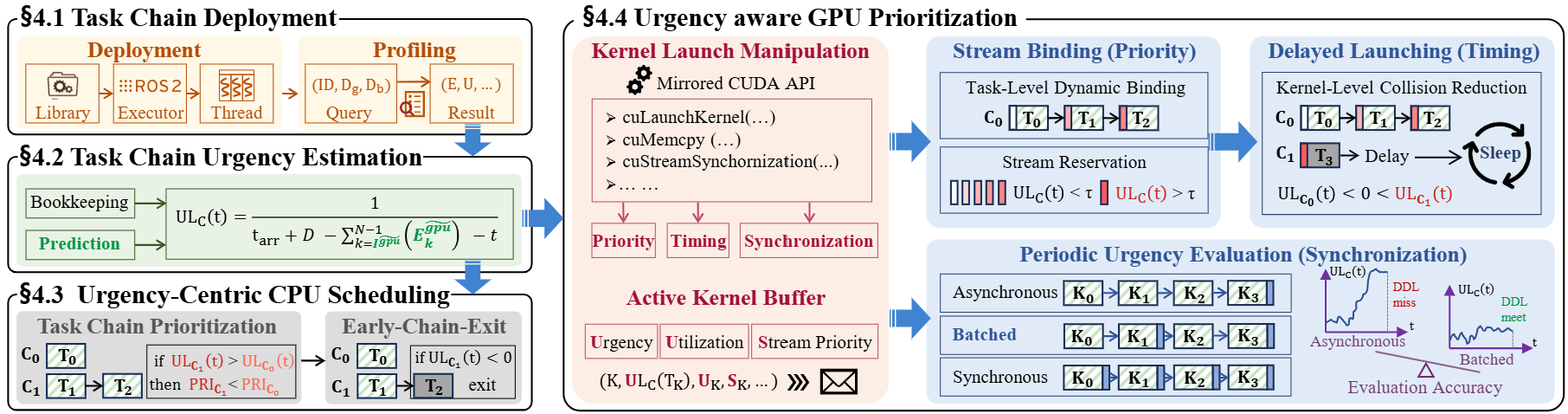
- 2025.08.25: Our paper UrgenGo is accepted by MobiCom 2025!
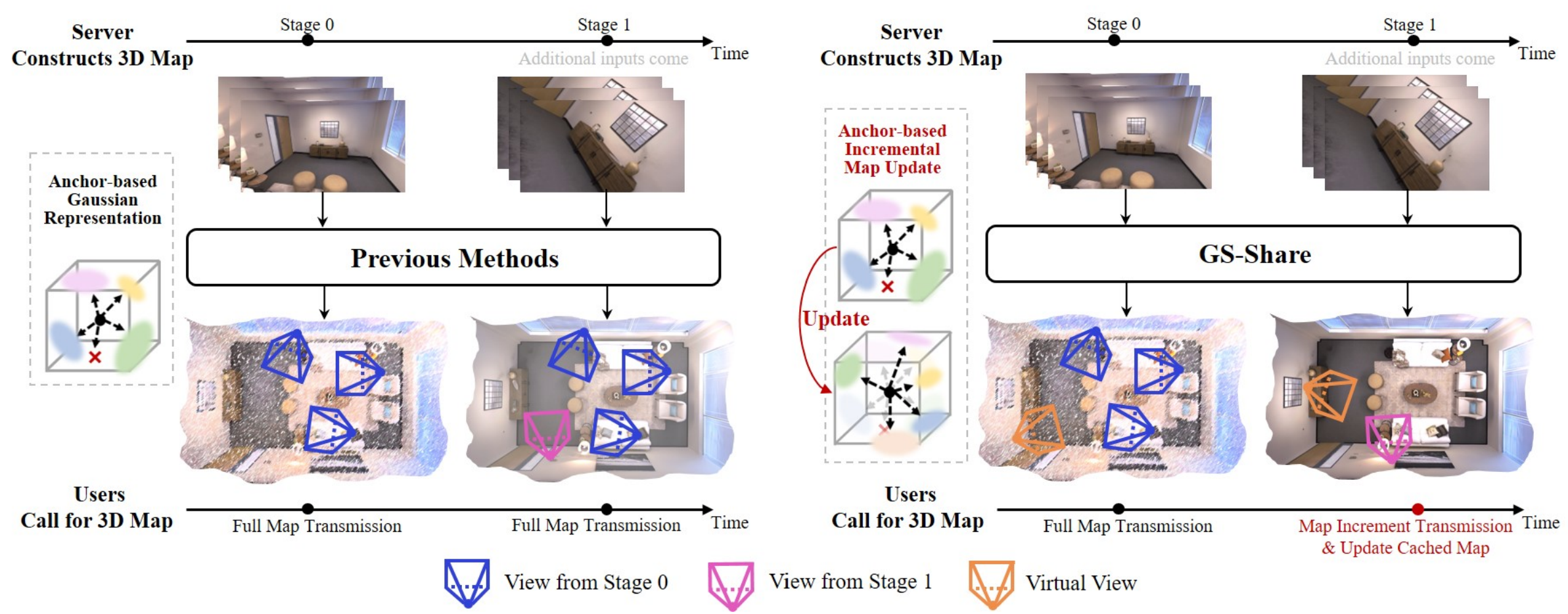
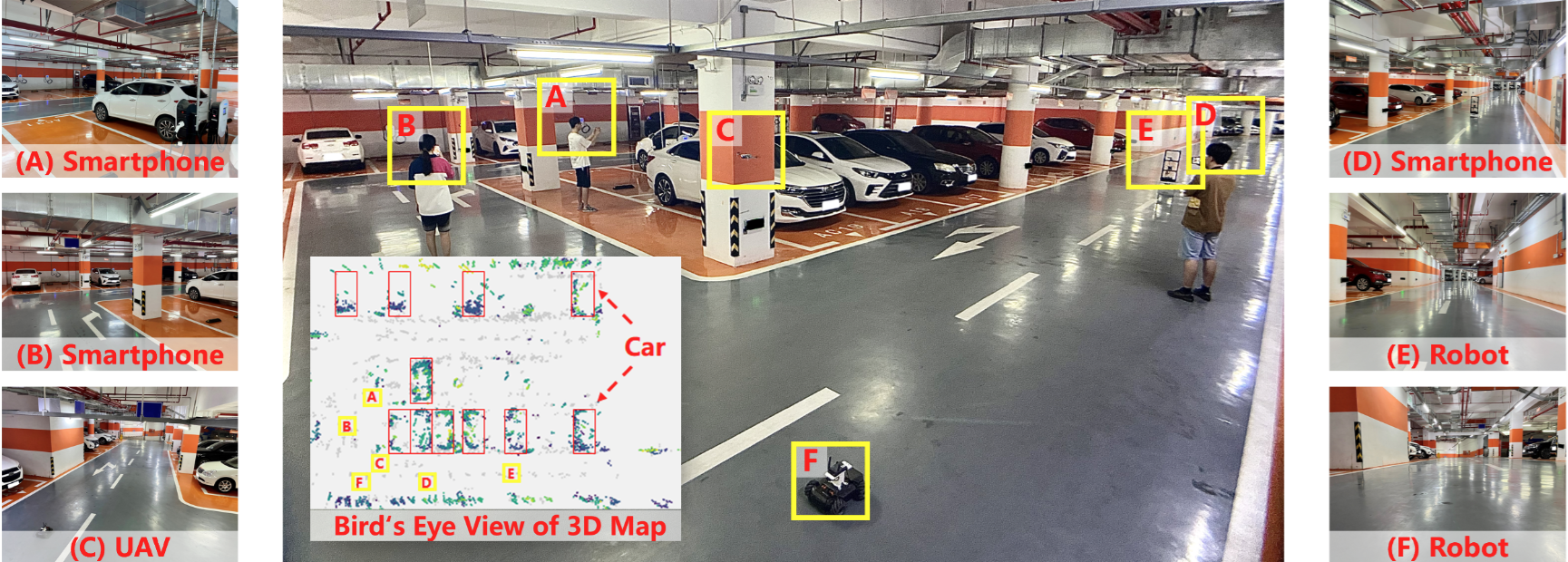
- 2025.08.23: Our paper GS-Share is accepted by CGF 2025!
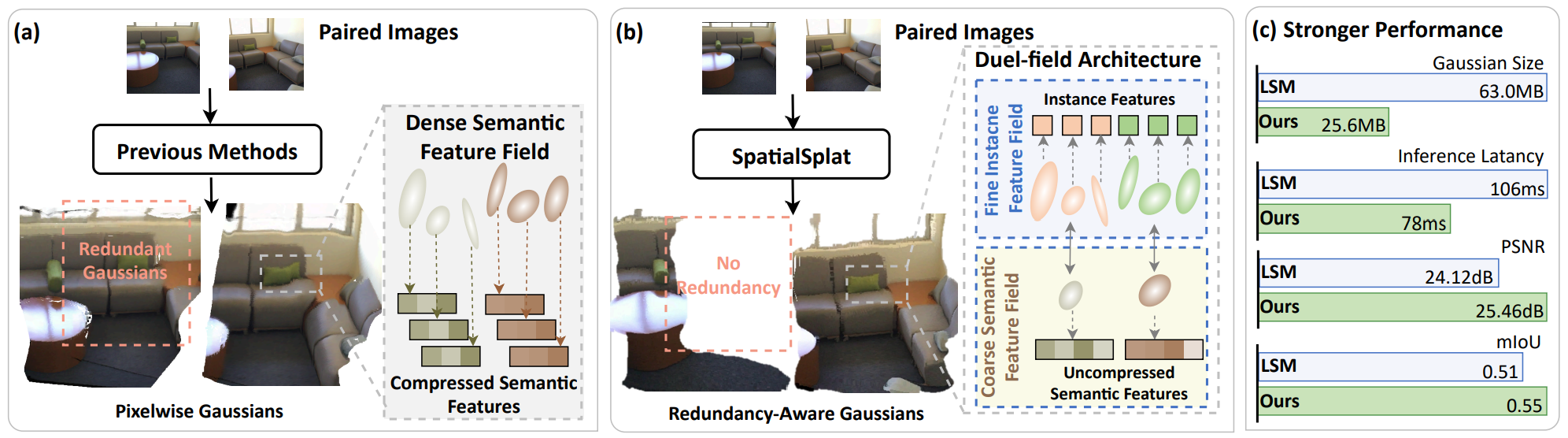
- 2025.06.26: Our paper SpatialSplat is accepted by ICCV 2025!
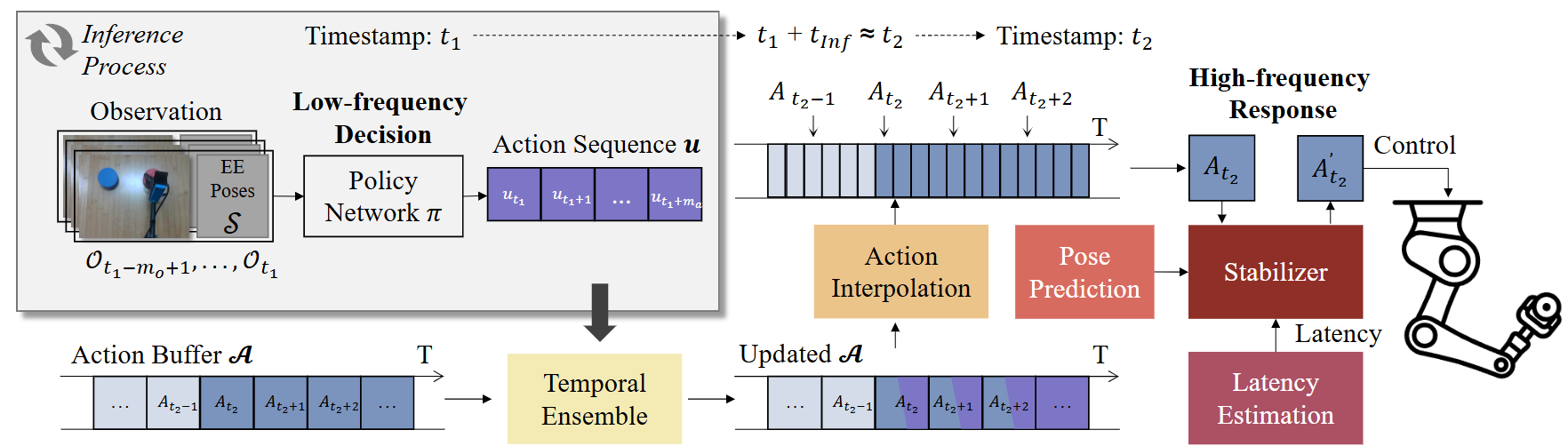
- 2025.04.11: Our paper STDArm is accepted by RSS 2025!
- 2025.03.04: Our paper UniSense is accepted by MobiSys 2025!
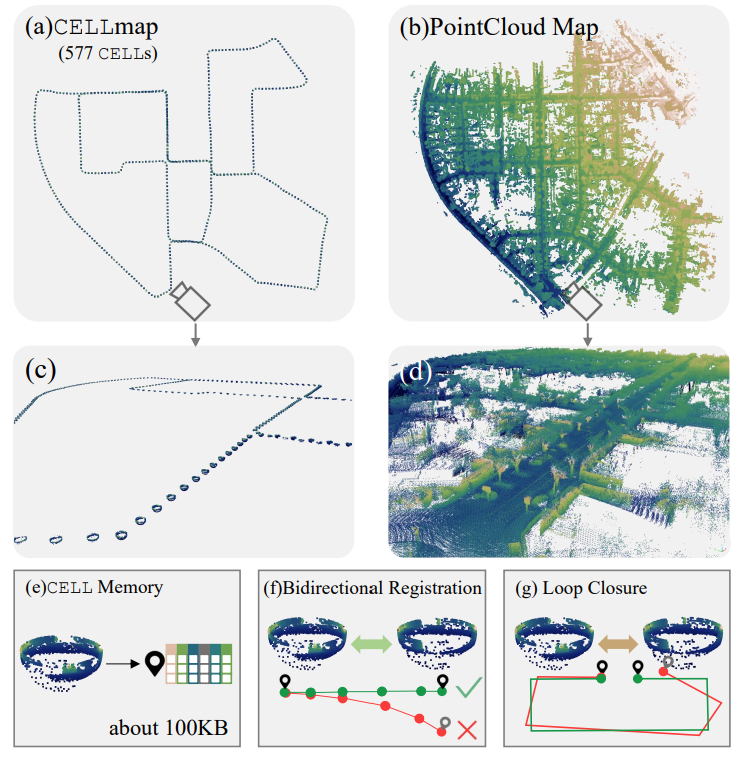
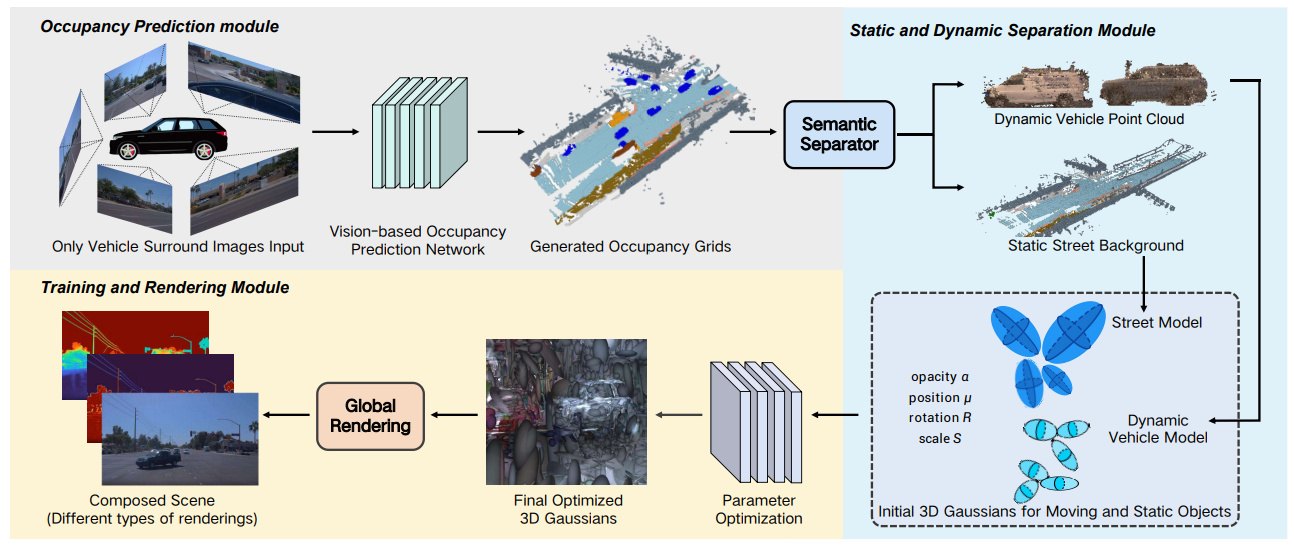
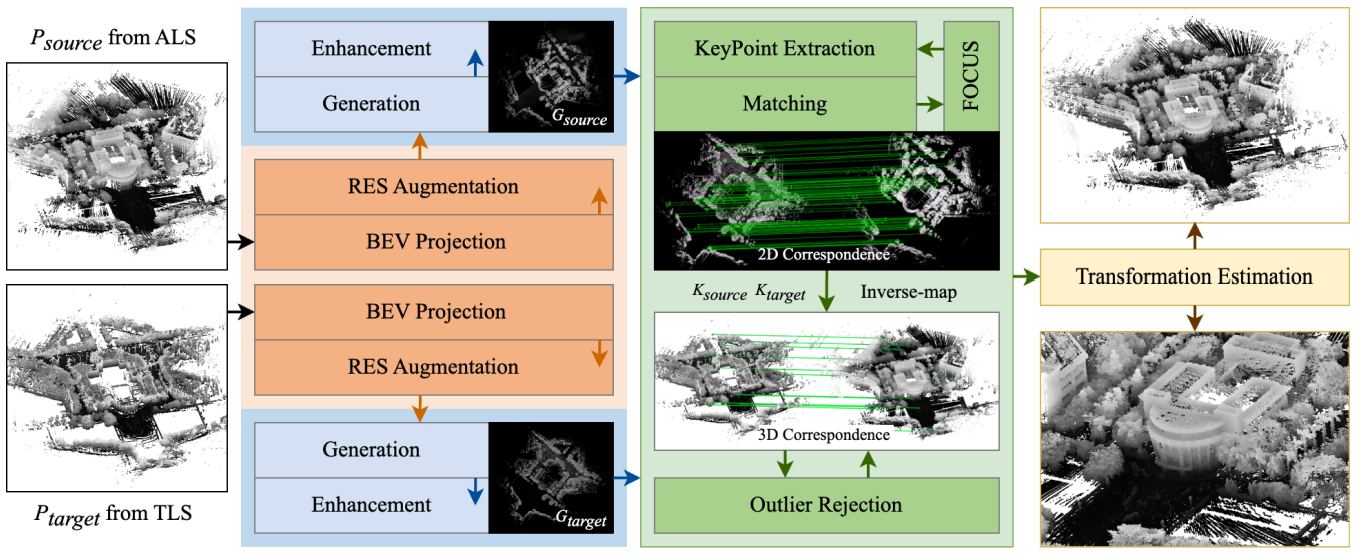
- 2025.01.28: Our paper CELLmap, OG-Gaussian, and MT-PCR are accepted by ICRA 2025!
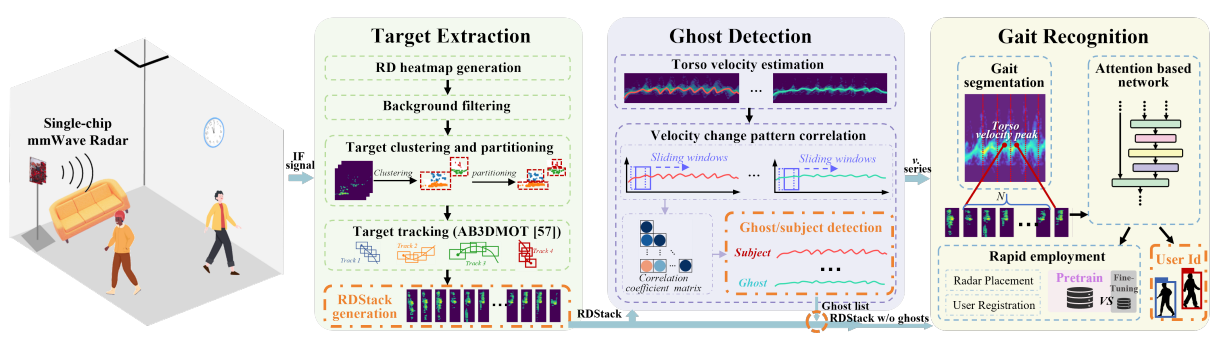
- 2024.09.09: Our paper RDGait is accepted by IMWUT/UbiComp 2024!
- 2024.02.24: Our paper Map++ is accepted by MobiCom 2024!
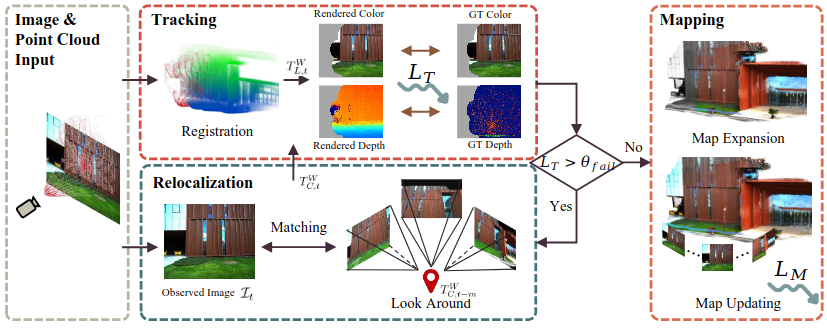
- 2024.06.30: Our paper MM-Gaussian is accepted by IROS 2024!
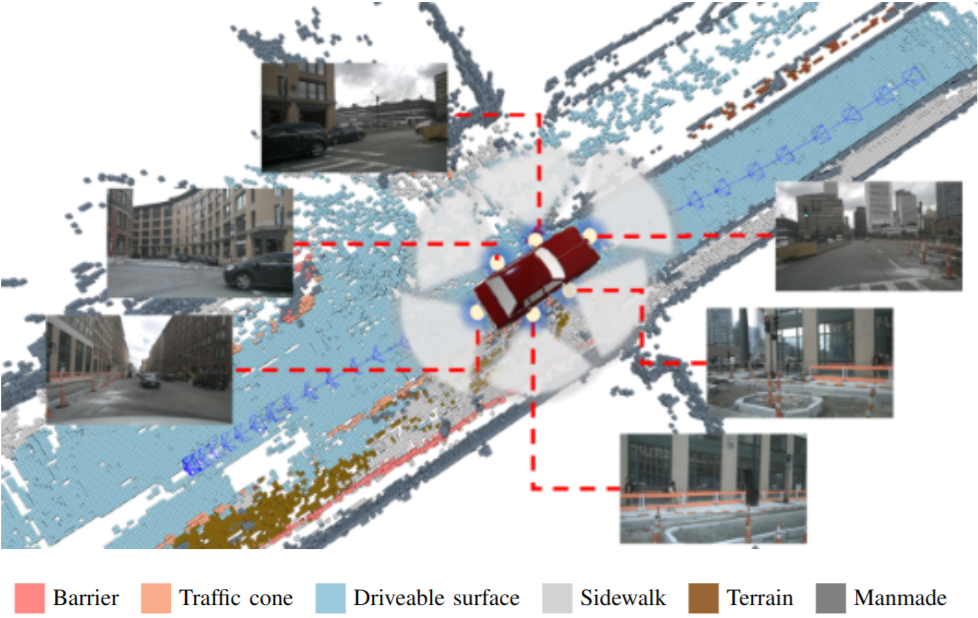
- 2024.01.29: Our paper OCC-VO is accepted by ICRA 2024!
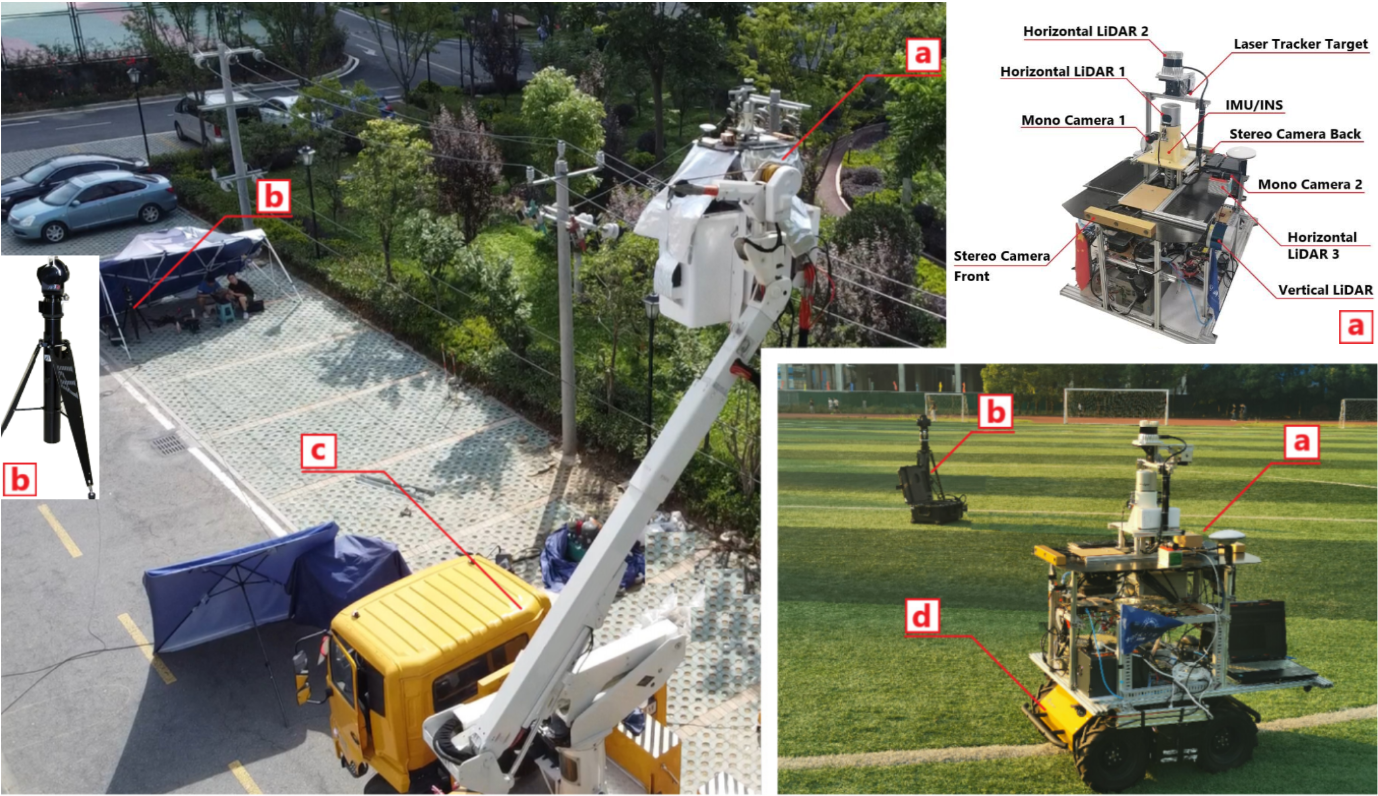
- 2023.07.18: Our dataset paper USTC FLICAR is accepted by IJRR!
Publications
IMWUT/UbiComp 2025
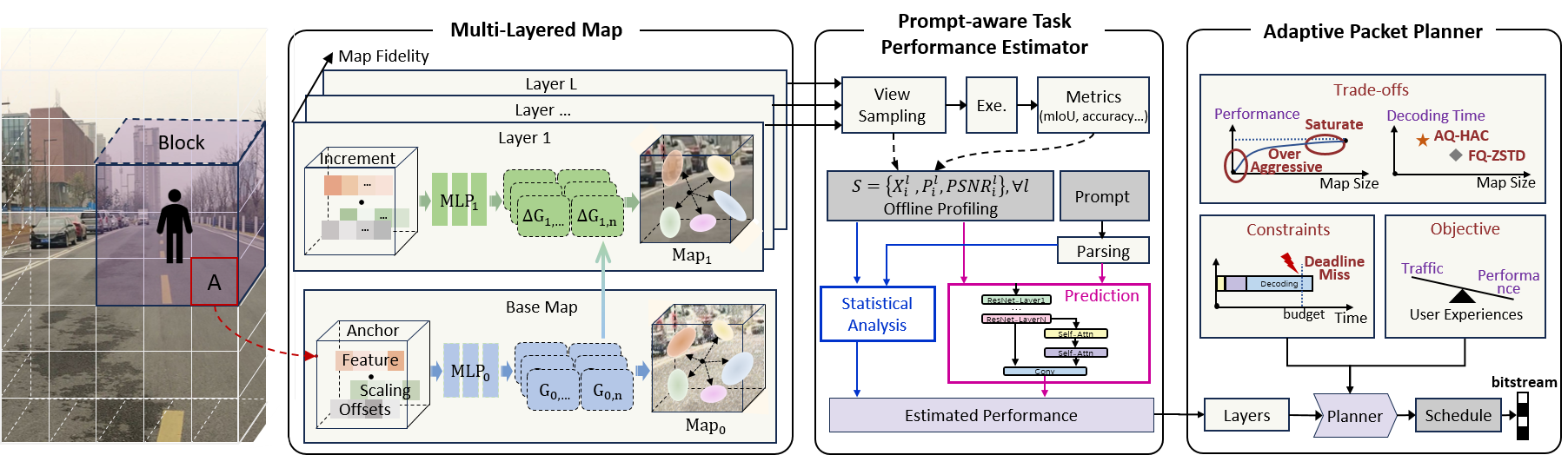
- PocketMap: An Interaction-centric 3D Map Serving System for Spatial Understanding on Mobile Devices
- Xinran Zhang, Wuyang Zhang, Hanqi Zhu, Yifan Duan, Jianmin Ji, Yanyong Zhang
-
Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies
MobiCom 2025
CGF 2025
ICCV 2025
RSS 2025
MobiSys 2025
ICRA 2025
ICRA 2025
ICRA 2025
IMWUT 2024
IROS 2024
MobiCom 2024
- Map++: Towards User-Participatory Visual SLAM Systems with Efficient Map Expansion and Sharing
- Xinran Zhang, Hanqi Zhu, Yifan Duan, Wuyang Zhang, Longfei Shangguan, Yu Zhang, Jianmin Ji, Yanyong Zhang
-
ACM MobiCom 2024: Proceedings of the 30th Annual International Conference on Mobile Computing and Networking
ICRA 2024
IJRR 2023
Internships
- 2022.06 - 2022.11, Heterogenous Extreme Computing Group at Microsoft Research Asia (MSRA).